
一、为什么要“三频”——精度的极限,不在算法,而在信号
你可能听过“RTK 定位能做到厘米级精度”, 但很少有人会问:为什么有些 RTK 收得快,有些却总“收不定”?
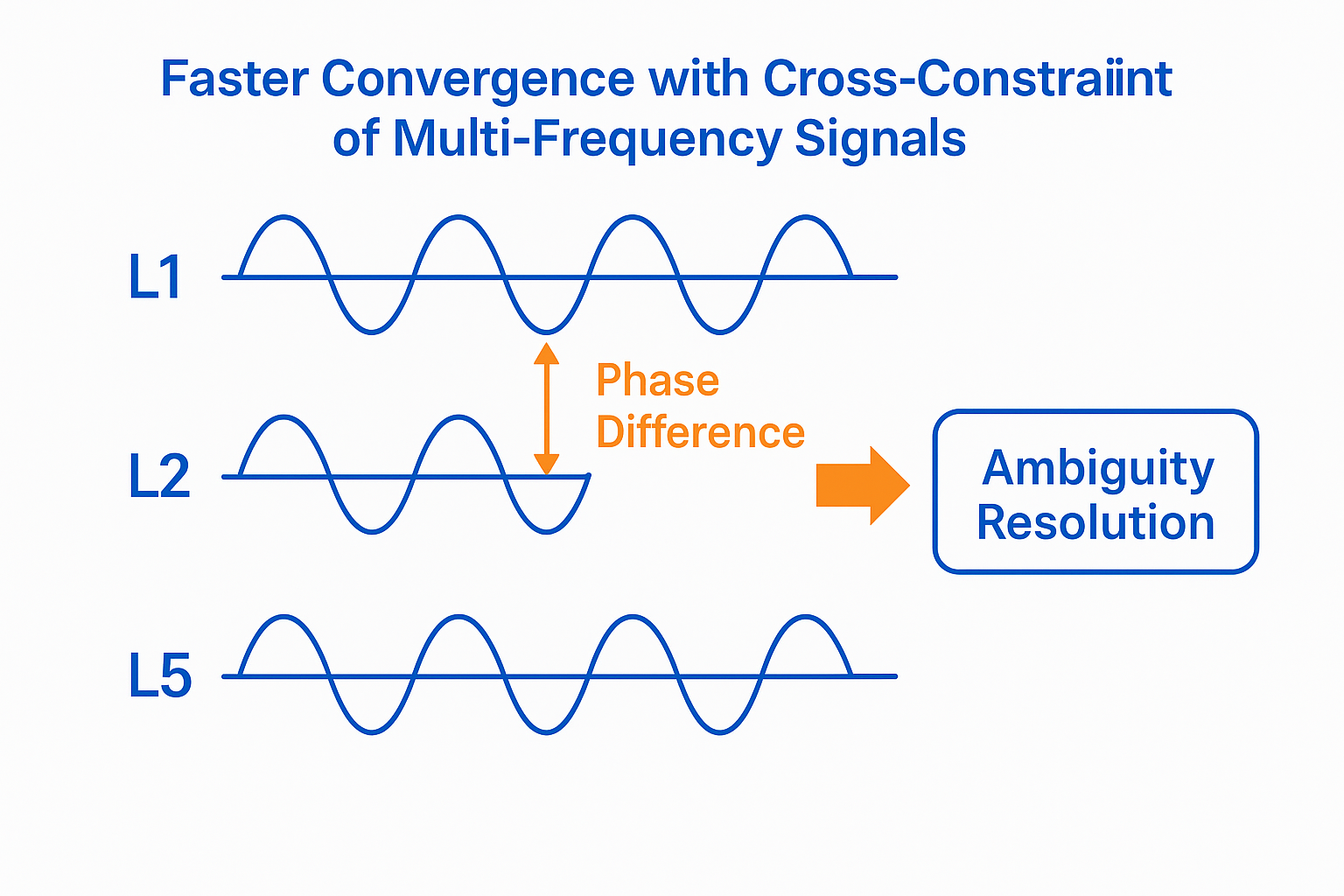
问题的根源在于: GNSS 的精度,取决于解算器能否准确判断每个卫星信号波的“整周数”。 而解算的关键,是相位。
然而相位测量存在天然的不确定性—— 你只能知道波形“此刻的位置”,但无法确定它“走了几圈”。 这就叫 模糊度(Ambiguity)问题。 RTK 要做的,就是通过多频、多差分和滤波算法,求解这个模糊度的整数值。
单频 RTK 解模糊就像只凭一个钟表看时间, 三频 RTK 则像多加了两只表,让时间误差“交叉验证”,收敛得更快。
二、什么是 RTK:从相位到厘米
RTK(Real-Time Kinematic)并不是一种“设备”, 而是一种基于载波相位的实时差分定位技术。
它的核心公式是:
ΔΦ=λ(N+δ)\Delta \Phi = \lambda (N + \delta)ΔΦ=λ(N+δ)
其中:
- ΔΦ 是两台接收机间的相位差,
- λ 是信号波长,
- N 是整周模糊度(需要解的整数),
- δ 是噪声与误差项。
单频 RTK 只能在一个频点上解方程, 三频 RTK 则引入更多观测方程,构建多维解算网络, 让系统在面对多径干扰、卫星几何劣化、信号遮挡时仍能快速锁定。
三频 RTK ≈ “更多独立方程 → 模糊度求解更稳 → 收敛更快”。
三、三频的价值:更快、更稳、更抗干扰
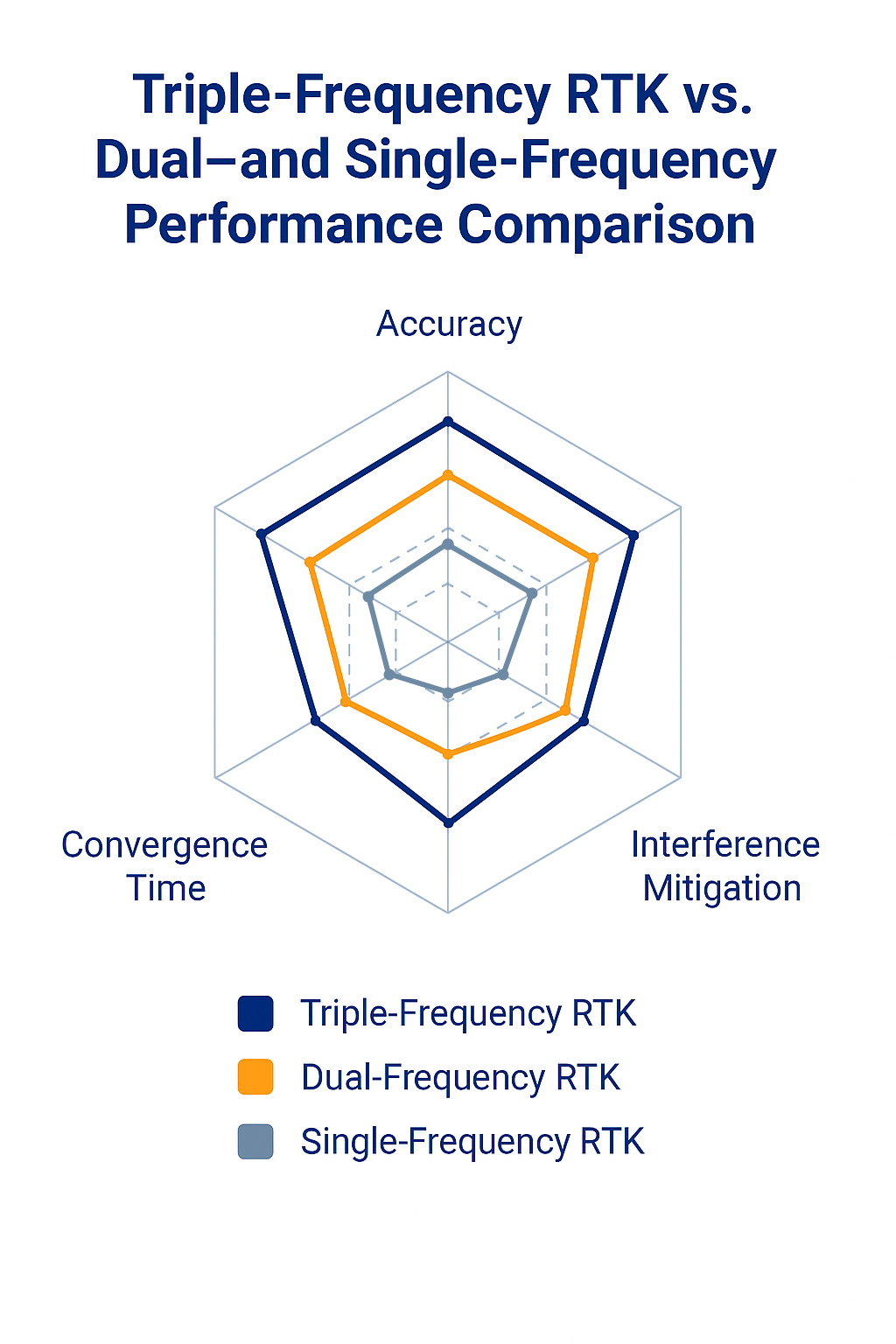
在工程环境中,三频 RTK 的价值不止于“更准”,而在于可靠性与稳定性:
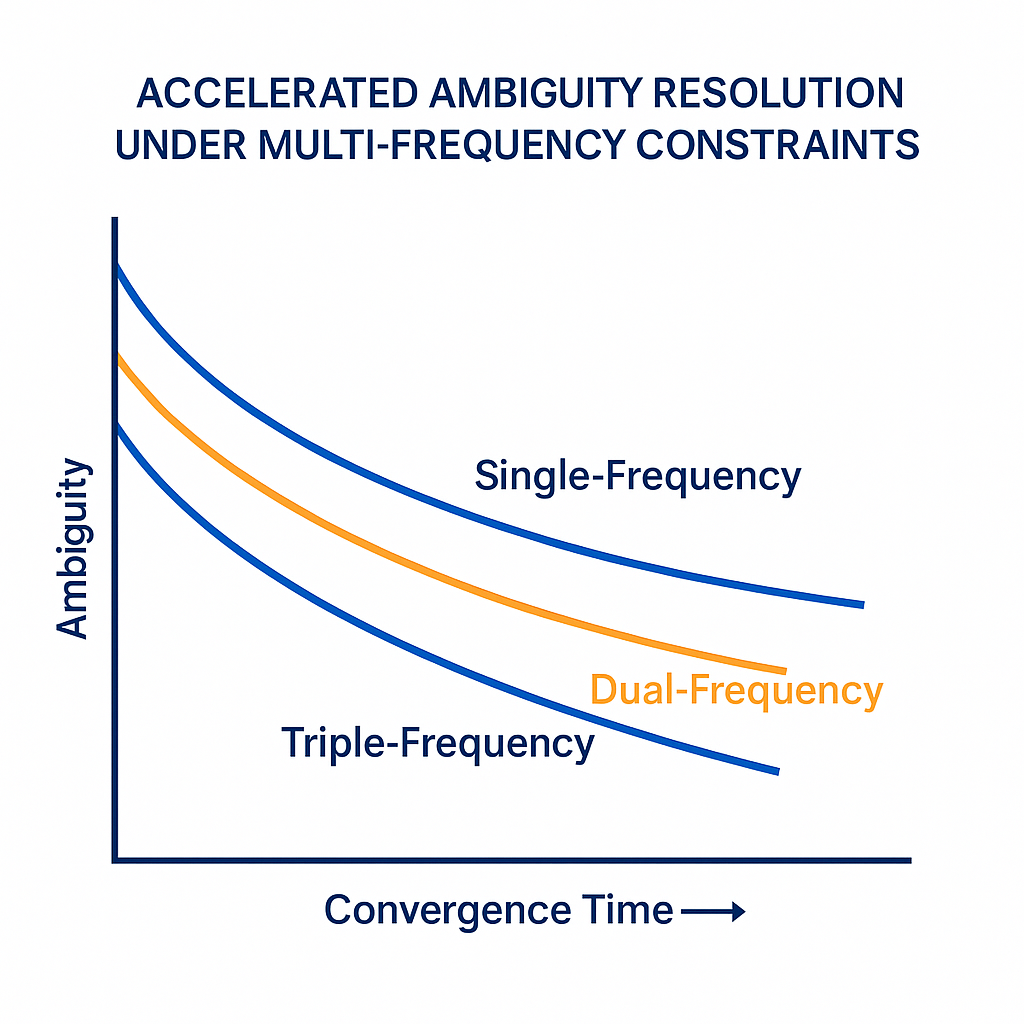
- ① 收敛更快:三频信号让模糊度求解时间缩短 30%–50%。
- ② 抗干扰更强:低频抗遮挡,高频抗多径,三频结合实现频域补偿。
- ③ 定位更稳:在城市峡谷或电离层波动场景中,误差平均降低 40%。
在 MOJANDA 芯片中, 这三点通过 三频融合算法 + 自适应滤波 协同实现, 使得定位不仅精准,更“稳得住”。
四、为什么车规级必须“三频化”
车规级应用场景(自动驾驶、无人农机、低空飞行器)有一个共性: 它们无法容忍“信号重捕获”造成的延迟。
单频 GNSS 在极端天气、桥下或电磁干扰时,容易失锁;
双频略好,但在高纬或复杂场景仍存在波动。
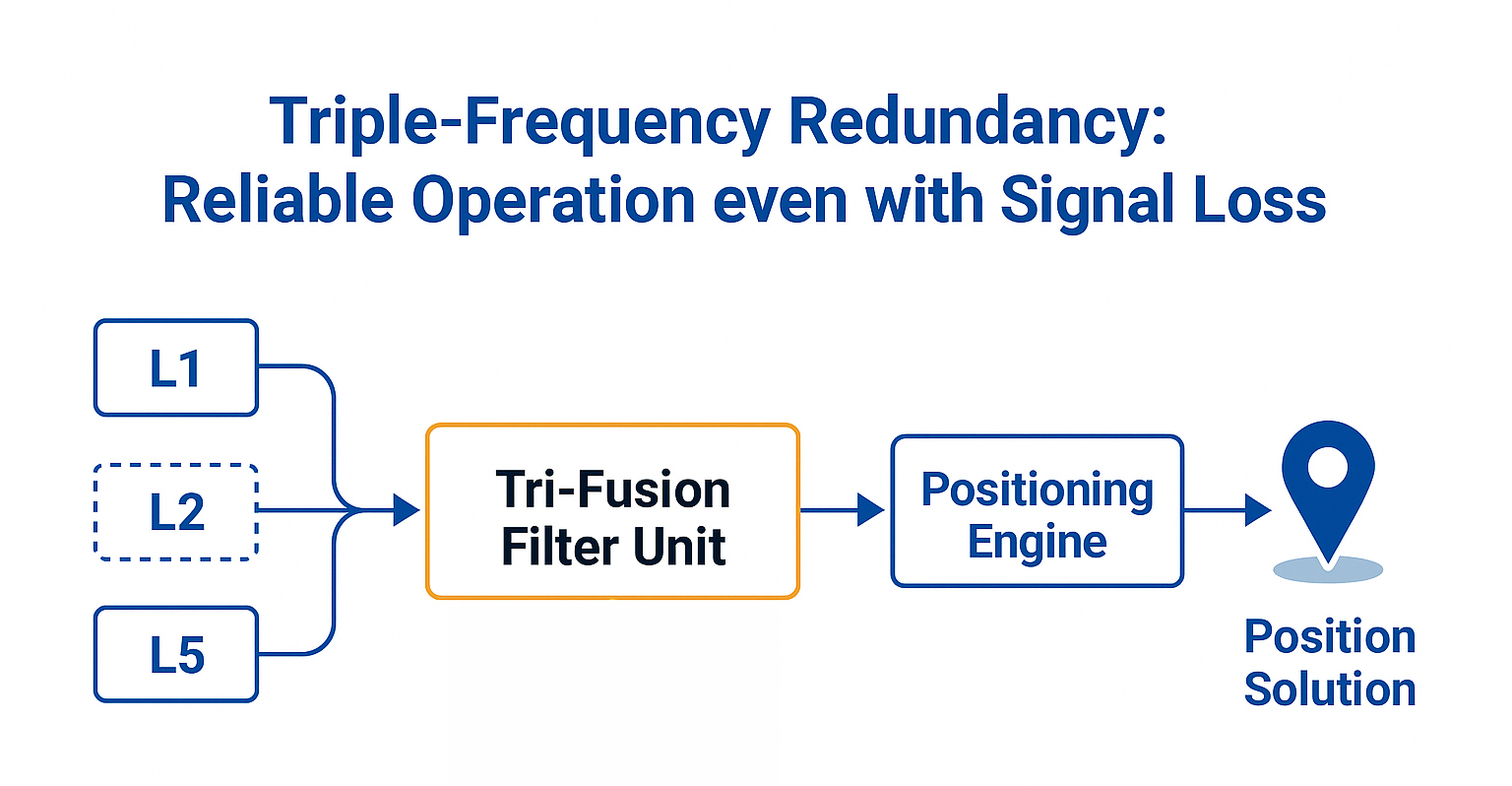
三频 RTK 则以多路径冗余方式构建可靠性闭环:
- 一频失锁,系统仍可依两频维持解算;
- 同步算法实时评估各频信号质量;
- MOJANDA 芯片内置 三频融合滤波单元(Tri-Fusion Filter Unit), 实现“信号动态加权”,优先选择质量最高的频段参与计算。
换句话说,三频 RTK 不仅“更快收敛”, 更是为了在极端情况下——仍有解算的底气。
五、从信号到信任:三频RTK的工程信仰
三频不是营销词,而是一种工程的敬畏。 它代表着面对物理世界的不确定性, 我们不再依赖单一信号,而是用冗余与算法让系统“自我修复”。
MOJANDA 的三频 RTK, 不仅提升了精度,更提升了在复杂世界中“活下去”的能力。
精度解决了“看得准”, 而三频,让系统“活得久”。
这正是 MCT 对空间智能的承诺:
用软硬结合与数据驱动,让每一个“坐标”都值得信赖。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。
我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略,
开发并提供全面的姿态感知与绝对定位软硬件解决方案,
服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。
公司基于自研的车规级北斗高精度芯片和模组,
融合高精度 IMU、视觉及雷达等传感器技术,结合海量数据,
为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑,
持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态? 欢迎访问 www.mctech.ai / www.mctai.cn, 或关注微信公众号「毫厘智能 MCT」。