由远及近,直至毫厘
“只有让信号与运动对话,定位才会真正‘理解’世界。”
一、为什么 GNSS 需要 IMU——当信号不再完整
GNSS 芯片的世界,是以“卫星为锚”的世界。
它靠卫星信号来确定自己“在何处”。
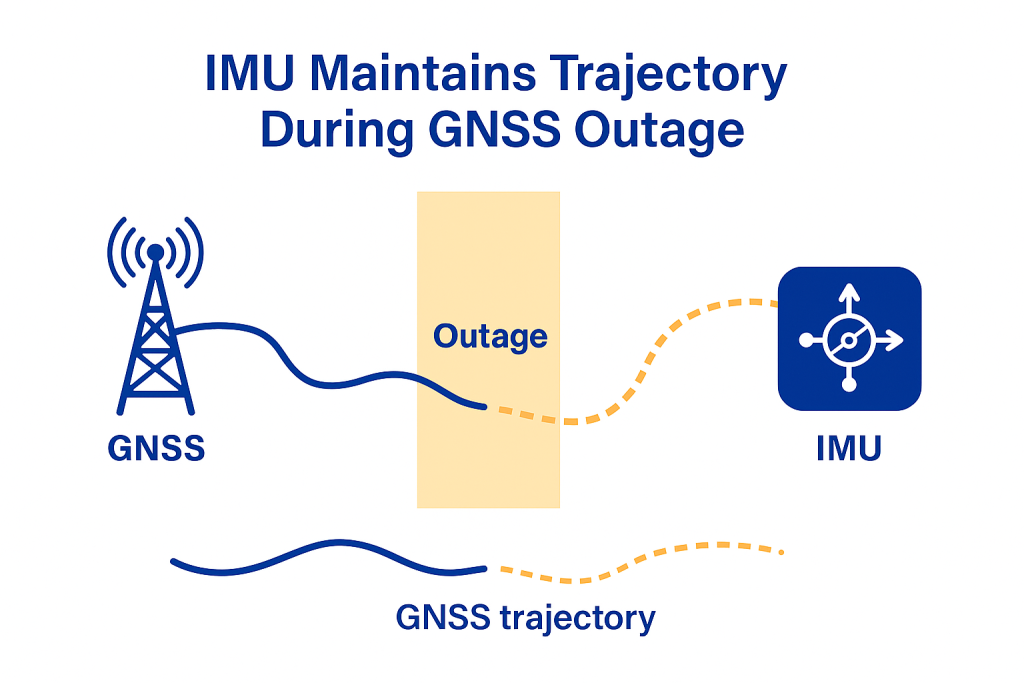
但在真实环境中,这些信号并不总是存在。
桥下、隧道中、林荫下、城市峡谷间,
卫星信号时常被遮挡、反射或干扰。
而 IMU(Inertial Measurement Unit,惯性测量单元) 记录的是另一种信息:运动本身的轨迹。 它不依赖外部信号,而通过加速度计和陀螺仪, 在极短时间内推算出姿态、速度和位移。
GNSS 告诉你“你在哪里”, IMU 告诉你“你是怎么来的”。 当两者融合,定位系统才具备“理解”的能力。
二、松耦合、紧耦合与深耦合:融合的“深度”
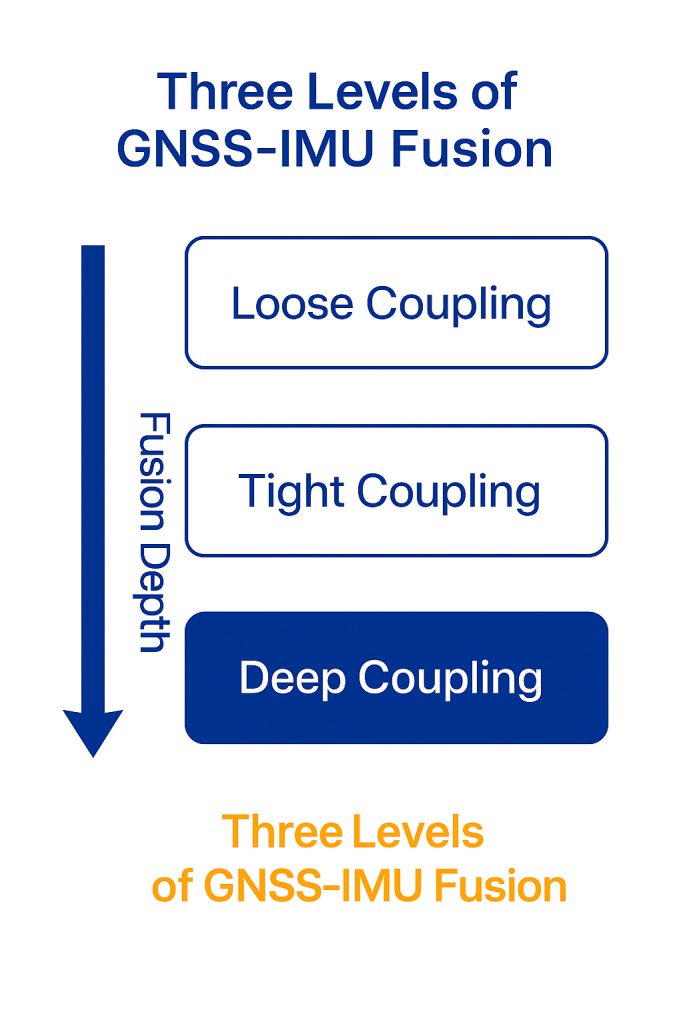
GNSS 与 IMU 的融合有不同层级,
核心差异在于——信息交互的“深度”。
- 松耦合(Loose Coupling): 两者各自独立运行,GNSS 只向 IMU 提供位置校正。 优点是实现简单,但反应迟钝。
- 紧耦合(Tight Coupling): GNSS 直接将卫星伪距和相位残差输入 IMU 滤波器, IMU 同时参与位置预测与误差修正。 优点是响应快、连续性强。
- 深耦合(Deep Coupling): 信号层与惯性层融合, IMU 反馈实时姿态给 GNSS 接收机前端,实现协同跟踪。 优点是即使部分卫星信号中断,也能保持精度。
MOJANDA 芯片目前采用的是紧耦合架构, 在不依赖专用 SoC 的前提下实现高精实时性, 兼顾功耗、精度与系统复杂度的平衡。
三、MOJANDA 的紧耦合架构:数据驱动的实时融合
在 MOJANDA 芯片中, 紧耦合并非简单的数据拼接,而是一种动态协同:
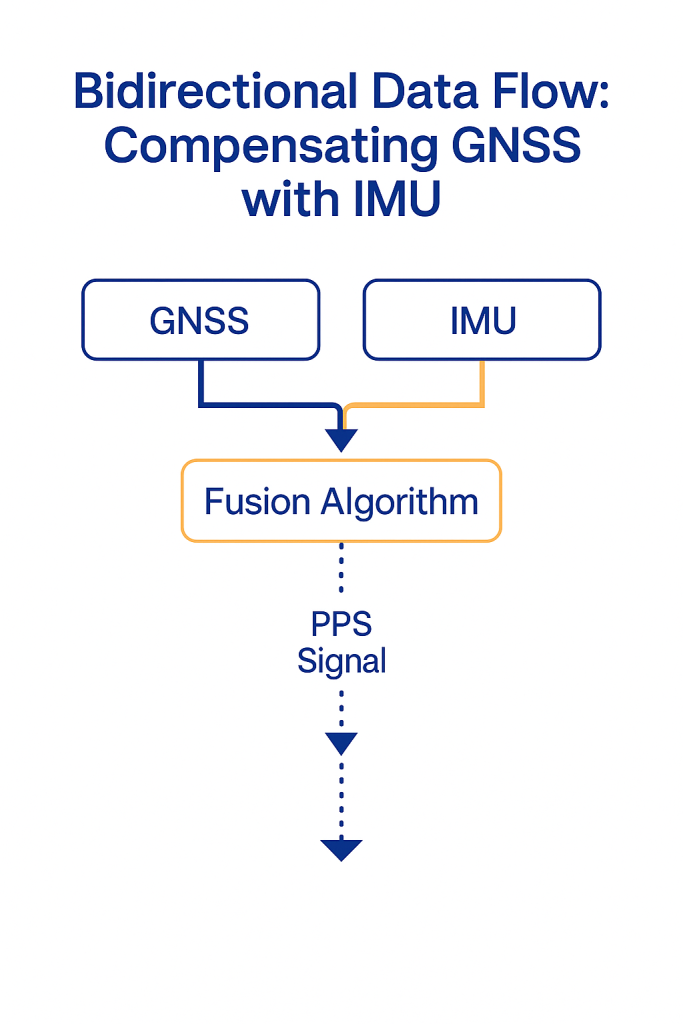
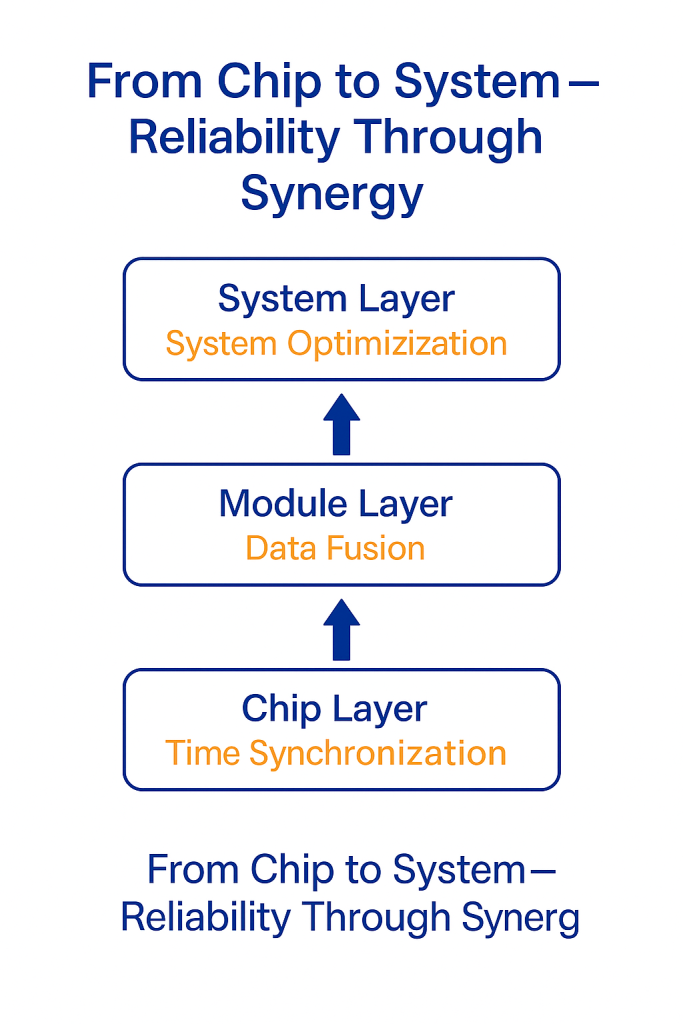
1️⃣ 统一时间基准(PPS 同步) GNSS 授时模块输出 PPS 信号, 作为 IMU、雷达、摄像头等多传感器的时间锚点, 确保所有数据在同一时间轴上融合。
2️⃣ 双向数据流结构 GNSS 将解算残差输入惯性解算器, IMU 的姿态预测则反向反馈至 GNSS 测距滤波器, 形成数据的双向耦合通路。
3️⃣ 自适应卡尔曼滤波(Adaptive Kalman Filter) 融合算法实时调整噪声协方差矩阵, 根据动态环境变化自动优化估计精度。
4️⃣ 边缘计算协同(Edge-AI Fusion) 芯片级 AI 算法可识别“异常运动”模式, 在突然转弯、急刹或颠簸等情况下保持定位连续性。
它不仅融合数据,更融合“运动的逻辑”。
四、从芯片到系统:协同的价值
在车辆、无人机、机器人等系统中, 单个芯片的性能并不能决定整体表现, 关键是它如何与其他模块协同。
MOJANDA 的设计理念,是从一开始就为系统服务。
它提供稳定的时钟源、标准化的时间戳接口、
和与 SUMACO IMU 模组的无缝通信协议。
这种设计让系统开发者能够:
- 快速构建融合框架(不必从头做同步校准);
- 降低算法复杂度(减少延迟与解算抖动);
- 提高系统通用性(适配不同的主控与平台)。
从芯片到系统,真正的竞争力不在单点性能, 而在“让整个系统更容易正确运行”。
五、融合的意义:让机器真正理解空间
空间智能的核心,不是“知道坐标”, 而是理解自己在三维世界中的状态与变化。
GNSS 给出了“世界的参照”,
IMU 提供了“自我的感觉”,
两者结合,构成机器的“空间意识”。
MOJANDA 的紧耦合设计,
正是迈向这一目标的关键一步:
让定位系统不仅“知道自己在哪”, 还“知道自己是怎么到这来的”。
这不仅是技术的融合,
更是让机器从“测量空间”走向“理解空间”的起点。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。
我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略,
开发并提供全面的姿态感知与绝对定位软硬件解决方案,
服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。
公司基于自研的车规级北斗高精度芯片和模组,
融合高精度 IMU、视觉及雷达等传感器技术,结合海量数据,
为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑,
持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态? 欢迎访问 www.mctech.ai / www.mctai.cn, 或关注微信公众号「毫厘智能 MCT」。