
一、从“抖动”到“稳定”:什么是 IMU 的“稳”
在自动驾驶系统中,IMU(惯性测量单元)是“姿态感知”的核心器官。
它由陀螺仪和加速度计组成,能实时测量载体的角速度和线加速度。
但 IMU 并不完美,它像一个时刻在倾听的传感器——
任何微小的噪声、温度变化、机械震动,都会让它“听错”。
于是,“稳”成为衡量 IMU 的第一标准。 但“稳”并非静止,而是意味着输出误差的可控性。
真正的车规级 IMU,不是让波动消失,而是让每一次波动都可预测、可建模、可补偿。
这正是 SUMACO 系列的出发点:让“稳定”成为算法可依赖的常量。

二、误差的根源:漂移与噪声
IMU 的输出误差主要来自两类因素:
- 确定性误差(Systematic Error) —— 来源于器件制造偏差、标度因子失准、零偏及温度特性变化等系统性因素;
- 随机性误差(Random Error) —— 来源于传感器噪声、外界扰动及随机漂移等非确定性因素。
系统性误差可通过标定校正; 而随机噪声则需要从时间维度建模。
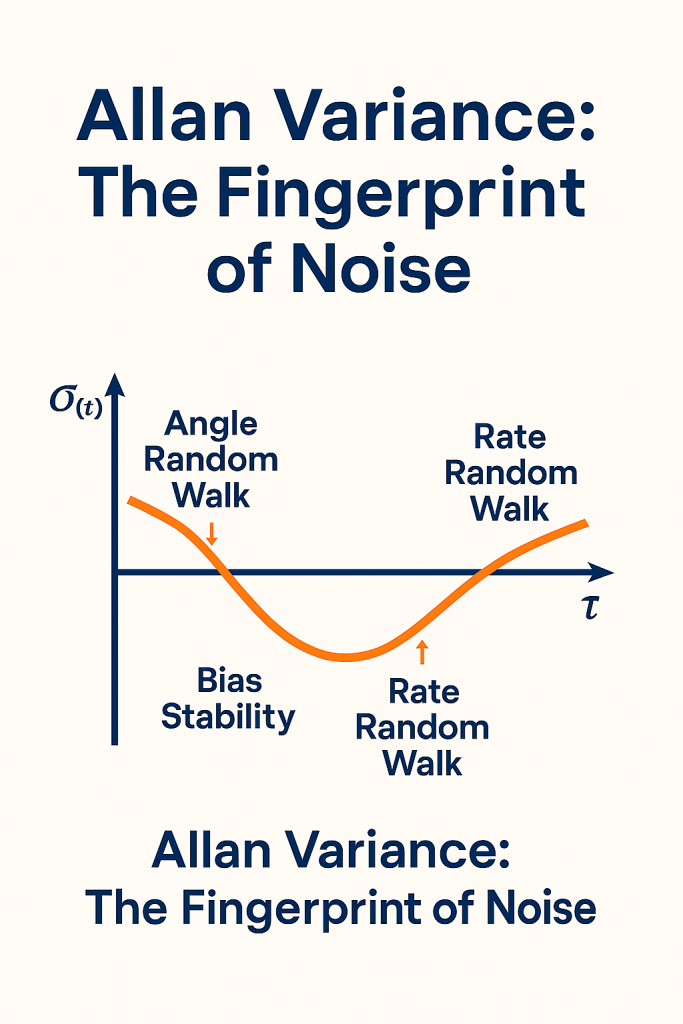
在 IMU 的专业测试中,工程师常用一种方法来识别噪声特征—— Allan 方差分析(Allan Variance Analysis)。
这就像在听音乐时识别“底噪”的节奏,通过时间间隔分析来辨别噪声类型。
三、温度的挑战:热噪声如何影响“稳”
IMU 的另一个敌人,是温度。
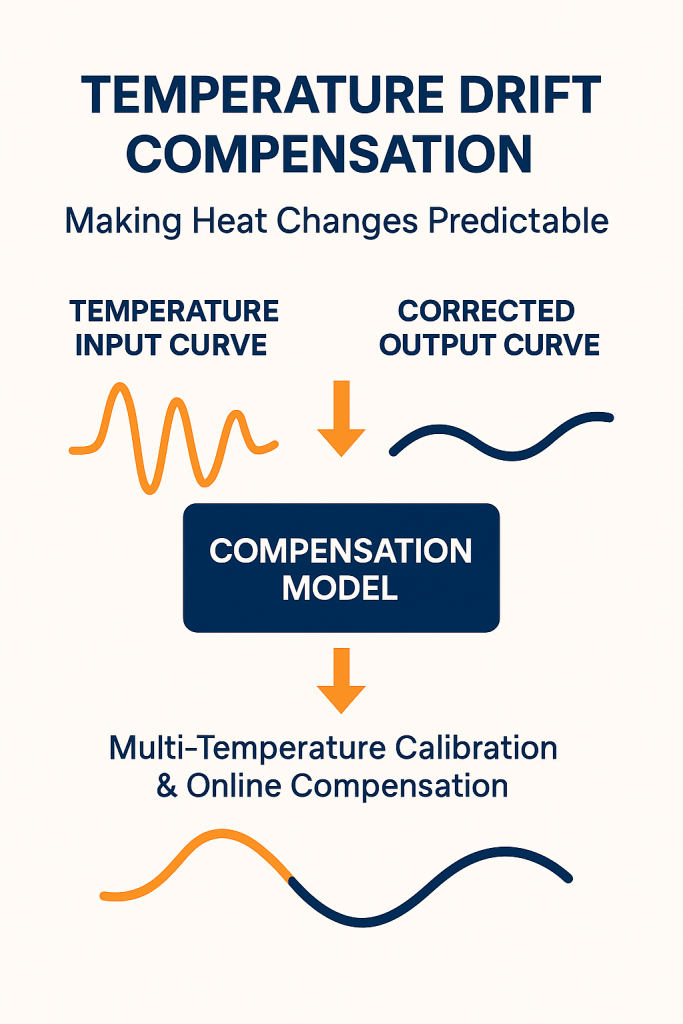
当环境从冬天的 -40℃ 到夏天的 +85℃,敏感元件的输出曲线会发生漂移。
这种“温漂(Temperature Drift)”会让姿态感知在高低温下不一致。
SUMACO 的解决方案是:
- 采用高稳定 MEMS 结构,降低材料应力变化;
- 在出厂前进行 多温标定(Multi-Temperature Calibration);
- 在运行时执行 在线温度补偿(Online Compensation)。
换句话说,它不仅“知道自己热了”,还能“知道热到什么程度会影响输出”,并即时修正。
四、从标定到量产:稳定的工业逻辑
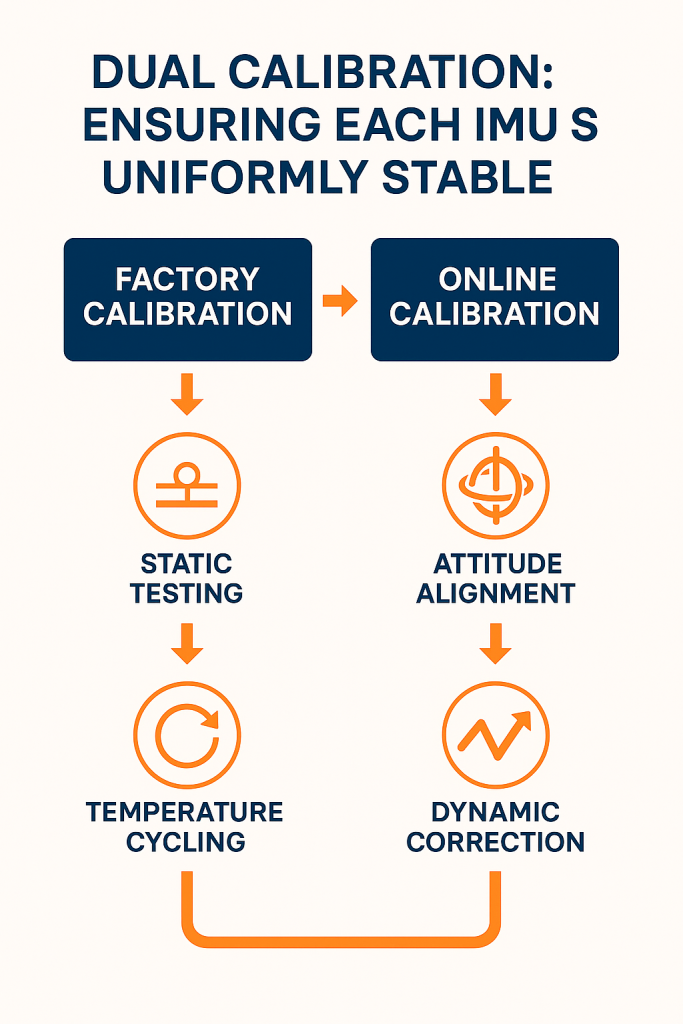
SUMACO 的“稳”并非源自单一算法,而是工业体系的结果。 在常州智能制造中心,SUMACO 采用“工厂标定 + 在线标定”双标定体系:
- 工厂标定阶段使用高精度转台与环境舱,校准零偏、比例因子与交轴误差;
- 在线标定阶段在整车装配后重新对齐姿态轴系,消除安装误差。
两级标定构建起从实验室到实际应用的一致性——
这就是“车规级 IMU”的工业底色:可批量复制的稳定。
五、“稳”是一种系统能力
真正的稳定,从来不是单一指标的优秀,而是系统的协同。
SUMACO 的稳定性来源于三重支撑:
- 车规级硬件设计,保证物理结构的稳定;
- 自研标定体系,确保误差的可控;
- 数据闭环机制,让性能持续进化。
这是一种更深层的“稳”——
不仅是数值上的稳定,更是认知上的确定。
当车辆、机器人或无人机依赖 SUMACO 提供的姿态数据时,
它们看到的世界,也因此变得更平滑、更可预期。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略,开发并提供全面的姿态感知与绝对定位软硬件解决方案,服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。公司基于自研的车规级北斗高精度芯片和模组,融合高精度 IMU、视觉及雷达等传感器技术,结合海量数据,为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑,持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态?
欢迎访问 www.mctech.ai / www.mctai.cn,或关注微信公众号「毫厘智能 MCT」。