
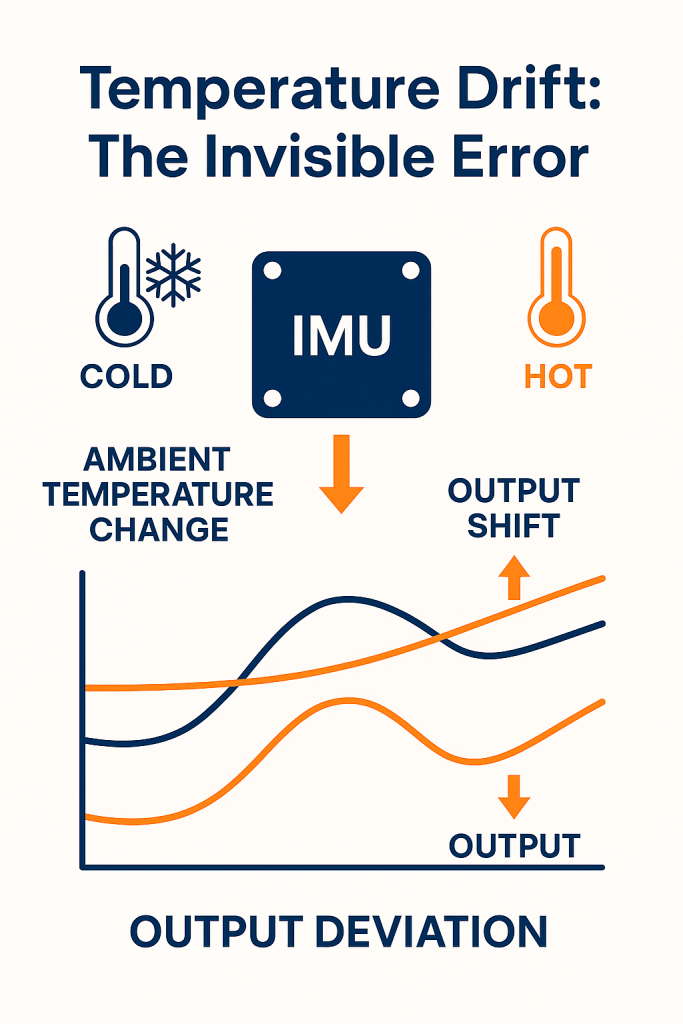
一、当温度成为“隐形的误差”
在理想状态下,IMU 测得的角速度与加速度应该与真实运动一致。
但现实中,只要温度发生变化,敏感元件的特性就会改变——
晶体的应力、焊点的膨胀、放大电路的漂移,
都会让原本的测量值“微微偏离”。
这种偏离不会让你立刻察觉,
但当车行驶几公里、机器人运转几分钟,误差就会逐渐积累。
温度漂移(Temperature Drift)
正是让惯性导航系统“看似稳,却悄然失准”的根源之一。
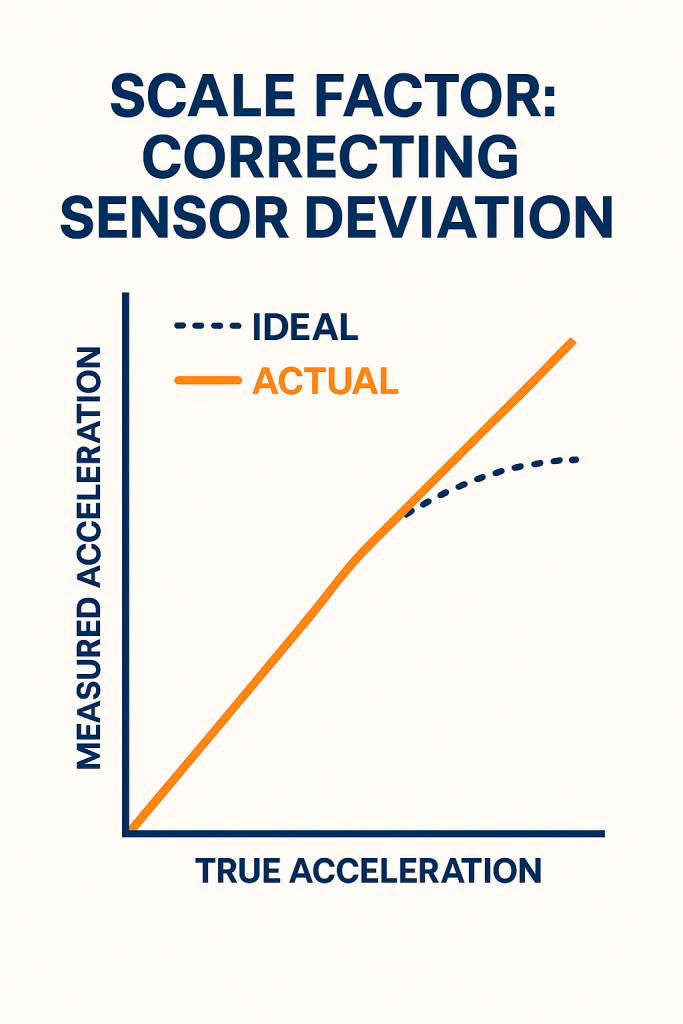
二、标度因子:每一度倾斜都要精确计算
除了温漂,还有一个隐藏的关键——标度因子(Scale Factor)。
它定义了传感器输出值与真实物理量之间的比例关系。
想象你拿着一把“稍微伸缩”的尺子去量距离:
每一段都只差一点点,但量得越多,误差越大。
在 IMU 中,这种比例偏差同样存在。 一个理想的加速度计输出应该是线性的, 但现实中,因电路、机械结构、老化等因素, 其响应曲线往往会轻微弯曲或失真。 这就需要通过标度因子校正, 让 IMU 的“刻度尺”重新回归标准。
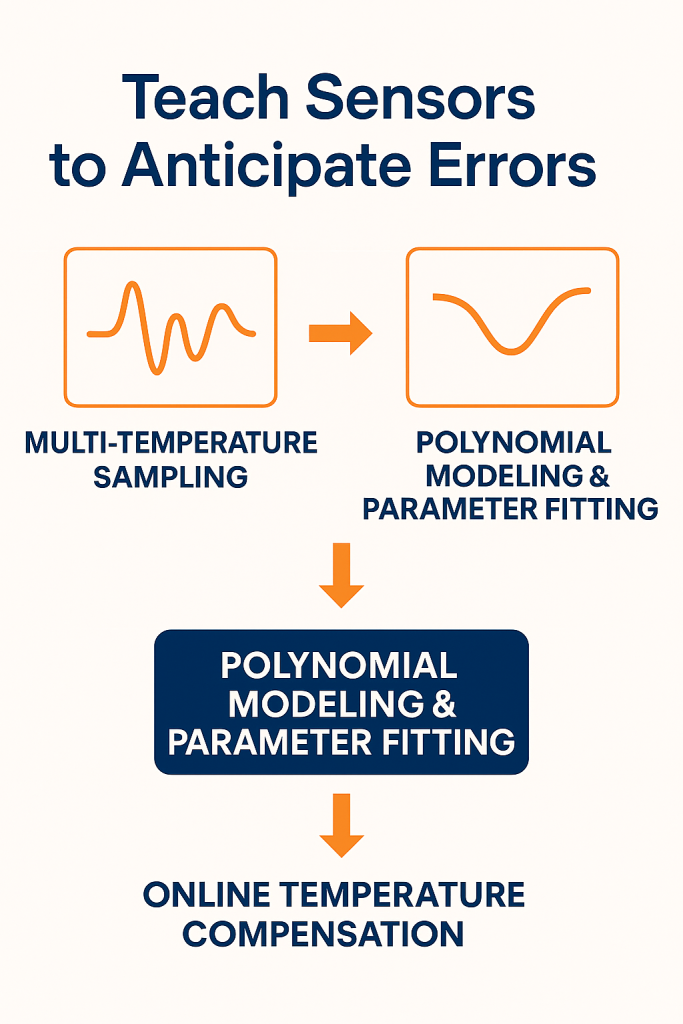
三、建模的艺术:把混乱变成可预测
SUMACO 系列 IMU 采用自研误差建模体系,将温漂与标度因子综合校正。
核心方法是:
- 多温标定:在 -40℃~85℃ 范围内记录传感器响应;
- 参数拟合:建立温度与输出的误差模型;
- 在线补偿:运行时动态读取温度,调用模型进行实时修正。
这一过程就像给传感器装上“大脑”——
它知道自己在变热或变冷时会出什么错,并主动抵消。
这种建模方法不仅适用于单台设备,
还可通过生产数据分析,逐步优化整个批次的系数模板,
让“稳定”成为可批量生产的结果。
四、可控的误差,才是可靠的系统
在车规级的语境下,IMU 不追求“零误差”, 而追求可控误差(Controllable Error)。 真正的稳定来自对误差的理解、建模与管理。 因此,SUMACO 把误差当作一种可被塑造的特性, 而不是必须掩盖的缺陷。
在出厂测试中,每一颗 SUMACO IMU 都经历:
- 多温度闭环验证;
- 动态标度因子测试;
- 数据拟合残差评估; 确保最终输出在所有温区、所有动态场景下, 都能保持一致的特性。
这也是“车规级”的核心含义之一——
不是比谁更灵敏,而是比谁更可预期。
五、稳定性,是建立在理解之上的
当系统知道自己在什么情况下会“犯错”,
它就更接近于真正的智能。
SUMACO 的温漂与标度因子模型,
让这种智能有了“物理的基础”。
从硬件到算法,从数据到模型,
稳定性不再只是产品特性,
而是对世界变化的理解能力。
因为唯有理解变化,
才能在变化中保持恒定——
这正是车规级 IMU 的价值所在。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。 我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略, 开发并提供全面的姿态感知与绝对定位软硬件解决方案, 服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。 公司基于自研的车规级北斗高精度芯片和模组,融合高精度 IMU、视觉及雷达等传感器技术, 结合海量数据,为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑, 持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态?
欢迎访问 www.mctech.ai / www.mctai.cn,或关注微信公众号「毫厘智能 MCT」。