

一、从“静止信号”中听出噪声的节奏
如果把 IMU 想象成一个“倾听世界的耳朵”,
那么 Allan 方差(Allan Variance)就是帮它识别自己听到的杂音。
在实验室里,工程师常让 IMU 静止工作数小时或数天——
不是为了看它“动得多准”,而是为了听它“静得多稳”。
IMU 输出的每一点数据中,都包含了噪声:有快有慢,有轻有重。
Allan 方差通过把时间拉长、再压缩,去观察误差如何随时间变化。
它不关心“此刻的误差”,而关心“误差的节奏”。
二、Allan 方差到底是什么?
Allan 方差是一种统计工具,用于区分不同类型的随机噪声。
它通过计算相邻时间段平均值的方差,分析信号随时间的波动特性。
可以简单理解:
- 如果误差变化得很快,它可能是随机游走(Random Walk);
- 如果误差变化缓慢但稳定,它可能是零偏漂移(Bias Drift)。
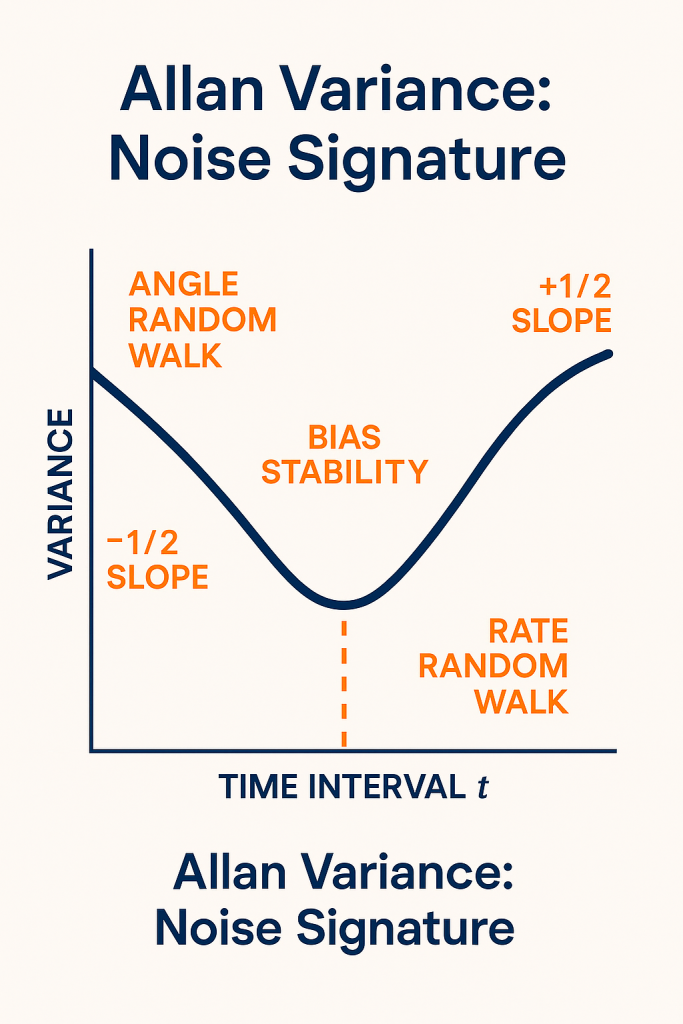
因此 Allan 方差的横轴是时间间隔 τ(tau),
纵轴是方差 σ(τ)。
不同噪声类型在曲线上的斜率不同,就像声音谱中的频率特征,
每种噪声都有自己的“声纹”。
三、从曲线中读出“噪声的家谱”
在 Allan 偏差曲线中,不同噪声类型通常呈现不同斜率特征:
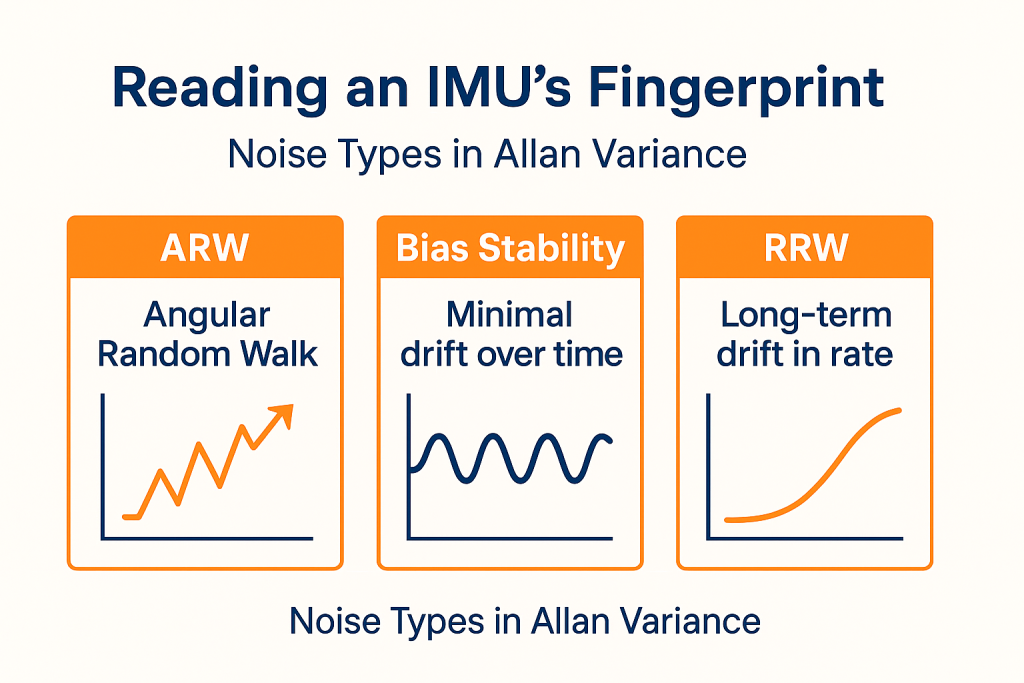
- 角随机游走(ARW):反映传感器短时白噪声主导下的随机抖动,对应斜率 -1/2;
- 零偏稳定性(Bias Stability):反映零偏在中长期内的稳定程度,通常对应曲线的最低点附近或近似平坦区;
- 速率随机游走(RRW):反映长期漂移累积趋势,对应斜率 +1/2。
对工程师而言,这张曲线就像 IMU 的“指纹”——
你可以从中看到它的天赋(传感噪声水平)、性格(漂移特征),
甚至判断它在不同环境下的表现。
四、为什么它对“车规级”至关重要
对于车规级 IMU,稳定性不是抽象的概念,而是要能被量化与复现。
Allan 方差让这种“稳定”有了客观标准:
- 它能评估不同批次器件的一致性;
- 能量化算法补偿的效果;
- 能判断温度、振动等环境因素对精度的影响。
在 SUMACO 的生产体系中,Allan 方差不仅是测试工具,
更是产品定义与质量控制的依据。
每一颗 SUMACO MA 系列模组在出厂前都需通过 Allan 方差评估,
确保噪声谱型与设定标准一致——这就是“可追溯的稳”。
五、在时间中建立信任
Allan 方差的意义,不止是识别噪声,而是理解时间的稳定性。
它告诉我们:稳定不是瞬间,而是长期积累的秩序。
正如驾驶员信任导航的连续,IMU 的“稳”也来自这种对时间的坚守。
在每一条 Allan 曲线的背后,是无数次测量与标定的努力——
让每一台车、每一个机器人,都能在时间的噪声中,
依然保持清晰的方向感。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。 我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略, 开发并提供全面的姿态感知与绝对定位软硬件解决方案, 服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。 公司基于自研的车规级北斗高精度芯片和模组,融合高精度 IMU、视觉及雷达等传感器技术, 结合海量数据,为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑, 持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态?
欢迎访问 www.mctech.ai / www.mctai.cn,或关注微信公众号「毫厘智能 MCT」。